Richiesta informazioni
Richiesta informazioni
 Contatti
Contatti
 Supporto
Supporto

Fino a qualche decennio fa parlare di mezzi a guida autonoma poteva sembrare fantascienza, ma oggi questa tecnologia non è più un miraggio e sempre più aziende del settore automotive stanno sviluppando modelli a guida assistita ed automatica in grado di affrontare ogni tipo di condizione; rimane comunque al momento una delle maggiori sfide che stanno affrontando le case automobilistiche.
Per quanto se ne parli, creare mezzi con un’intelligenza artificiale sviluppata a tal punto da poter guidare senza l’intervento dell’uomo e in grado di prendere decisioni fondamentali in pochi millesimi di secondo, non è per nulla semplice. In fase di test sulle strade aperte alla circolazione non è mancato qualche incidente, ma passo dopo passo si sta arrivando a modelli sempre più evoluti che non richiedono l’intervento umano alla guida.
Con mezzo a guida autonoma si intende un veicolo in grado di soddisfare le principali capacità di trasporto di un mezzo tradizionale, in grado di rilevare l’ambiente e quindi modificare la conseguente navigazione senza intervento umano.
I mezzi a guida autonoma esplorano l’ambiente circostante con strumenti quali radar, lidar, videocamere, GNSS e ultrasuoni, mentre sistemi di controllo avanzati interpretano le informazioni ricevute per individuare percorsi appropriati, ostacoli e segnaletica.
Anche I&S Informatica e Servizi, nell’ambito dei progetti di ricerca interni, ha sperimentato soluzioni a guida autonoma da adattare alla raccolta differenziata dei rifiuti urbani porta a porta.

La guida autonoma nella raccolta differenziata porta a porta è un tema che potrebbe diventare sempre più rilevante nel prossimo futuro. L’idea di base, molto complessa da realizzare, è quella di utilizzare veicoli autonomi per raccogliere i rifiuti differenziati direttamente dalle abitazioni dei cittadini, migliorando l’efficienza e la sostenibilità nella gestione dei rifiuti urbani.
I vantaggi di questa soluzione sono molteplici: il principale è migliorare l’efficienza e la velocità della raccolta, poiché i veicoli autonomi possono essere programmati in modo dinamico per eseguire un percorso ottimale e raccogliere solo i contenitori pieni, riducendo il numero di viaggi necessari. Inoltre, l’utilizzo di veicoli autonomi ridurrebbe la necessità di operatori umani per la raccolta, riducendo i costi e migliorando la sicurezza.
Per eseguire la raccolta differenziata porta a porta con mezzi a guida autonoma, è necessario utilizzare veicoli multi-sensore per la rilevazione della posizione e degli ostacoli, sistemi di navigazione avanzati e una serie di algoritmi di intelligenza artificiale per pianificare i percorsi e le missioni dei mezzi.
Questa soluzione, da realizzare in forma prototipale, richiede una buona infrastruttura tecnologica per la gestione dei mezzi e la collaborazione tra diverse parti interessate: aziende del settore automotive, aziende di raccolta dei rifiuti che utilizzano modelli organizzativi evoluti, fornitori di tecnologia digitale di alto profilo, autorità locali.
Inoltre, ci sono anche alcune considerazioni etiche e legali che devono essere affrontate, come la sicurezza dei veicoli autonomi e la protezione della privacy dei cittadini durante la raccolta dei rifiuti.
I&S Informatica e Servizi di Trento ha sviluppato uno specifico progetto di ricerca, denominato Smart Drive Assistant (SDA), che si è focalizzato nello studio di modelli operativi e soluzioni tecnologiche flessibili, parametriche, facilmente configurabili applicabili ai mezzi a guida assistita e automatica, da applicare nei processi di raccolta differenziata porta a porta e on demand. Sono due tipi di servizi per la gestione dei rifiuti domestici che hanno l’obiettivo di promuovere la raccolta differenziata e ridurre la quantità di rifiuti da smaltire.
La raccolta differenziata porta a porta prevede che i rifiuti siano raccolti direttamente dalle abitazioni degli utenti, seguendo un calendario prestabilito, in cui vengono indicati i giorni e gli orari di passaggio dei mezzi che effettuano la raccolta. In questo modo, gli utenti sono chiamati a separare i propri rifiuti in base alle diverse tipologie (carta, plastica, vetro, organico, ecc.) e a depositarli negli appositi contenitori forniti dall’amministrazione comunale o dall’azienda che gestisce il servizio di raccolta.
Il servizio on demand, invece, permette agli utenti di richiedere la raccolta dei rifiuti quando ne hanno bisogno, senza dover seguire un calendario prefissato. Questo tipo di servizio è particolarmente utile per gli utenti che generano pochi rifiuti e che, quindi, non hanno la necessità di una raccolta regolare.
In entrambi i casi, l’obiettivo è quello di incentivare la raccolta differenziata e ridurre la quantità di rifiuti indifferenziati da smaltire. Inoltre, questi servizi permettono di avere maggior controllo sulla gestione dei rifiuti, garantendo una maggiore efficienza nella raccolta e nel trattamento degli stessi.
Nel corso del progetto è stato necessario approfondire molti temi tecnici e tecnologici per garantire il risultato finale del progetto, quali ad esempio: predisposizione di centrali di controllo delle flotte di mezzi, sistemi di localizzazione e navigazione, sensori e apparecchiature, sistemi di integrazione con veicoli a guida autonoma, sistemi di memorizzazione e cruscotti operativi per l’analisi di grandi quantità di dati.
Per lo sviluppo del progetto è stato adottato un approccio metodologico suddiviso in quattro Obiettivi Realizzativi (OR), su un arco temporale di 30 mesi; l’aiuto nell’identificazione dell’ambito e nella stesura degli elementi progettuali è stato fornito dal centro di ricerca FBK di Trento.
Nello sviluppo del progetto pilota è stata coinvolta la società Lifetouch di Parma che ha messo a disposizione un mezzo a guida autonoma, MOVEO.
Il test site per le prove sul campo è stato identificato presso Fiere di Parma, in un ampio parcheggio chiuso al pubblico.
L’architettura tecnico funzionale è riportata nella seguente immagine:
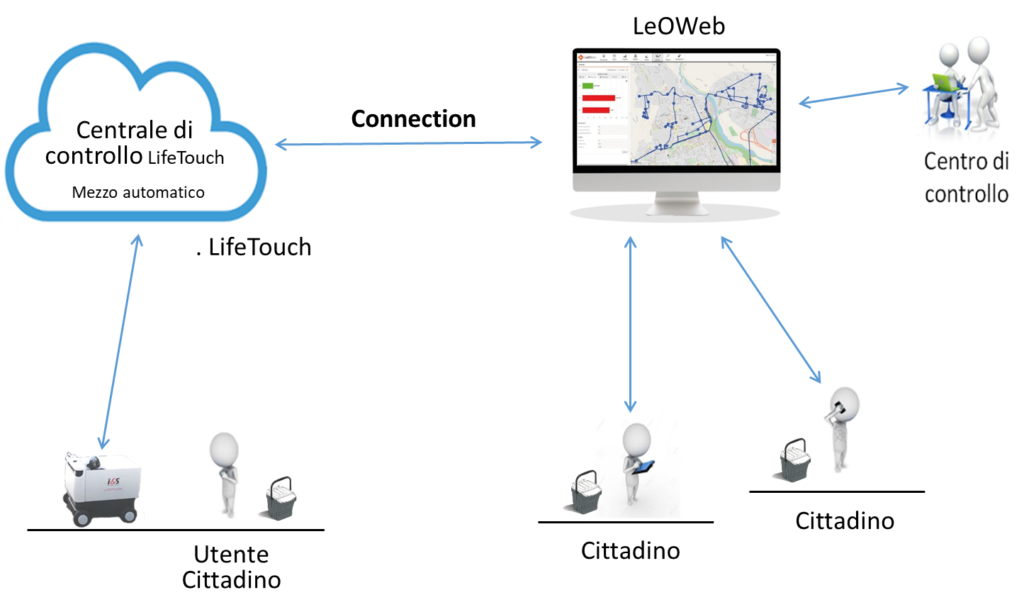
Il cuore pulsante del progetto pilota è la centrale di controllo dei mezzi di I&S, denominata LEO.
Rappresenta una piattaforma software che permette la gestione ed il monitoraggio in modo efficiente dei mezzi a guida autonoma. Questo sistema fornisce informazioni sui veicoli, come la loro posizione, la loro velocità e il loro stato, consentendo ai gestori di prendere decisioni sulla pianificazione dei percorsi e sulla schedulazione automatica delle missioni.
Il sistema raccoglie informazioni in tempo reale sulla localizzazione e sulla navigazione del mezzo, fornendo indicazioni stradali e aiutando il mezzo a guida autonoma a raggiungere la destinazione finale in modo più efficiente e sicuro. Fornisce inoltre informazioni sulle soste e sui tempi di fermata.
Sul mezzo a guida autonoma sono installati sensori e apparecchiature che raccolgono informazioni sulle condizioni stradali, sulle prestazioni del veicolo e su una serie di attività in real time: posizione, visione, presenza di ostacoli, motivi delle fermate, avanzamento sul percorso, altre informazioni utili. Questi dati sono raccolti e memorizzati nella centrale di controllo.

L’applicazione Connection rappresenta l’integrazione del mezzo a guida autonoma con le componenti tecnologiche sviluppate da I&S, permettendo al veicolo di interagire con la centrale di controllo ed il mondo esterno. Tramite questo sistema viene effettuato lo scambio automatico dei dati, quali missioni e percorsi da eseguire, informazioni sulle posizioni e sulle fermate, condizioni del traffico. Questi dati sono utilizzati per prendere decisioni e modificare eventualmente la pianificazione delle missioni del mezzo.
Nella piattaforma software di controllo sono inoltre presenti strumenti di memorizzazione e cruscotti operativi per l’analisi di grandi quantità di dati; consentono ai gestori del mezzo a guida autonoma di analizzare grandi quantità di dati raccolti sui veicoli e sulle loro attività. Questi dati potrebbero essere in futuro elaborati per ottenere analisi predittive, utilizzando strumenti di Intelligenza Artificiale.
La sperimentazione di una centrale di controllo per la gestione di mezzi a guida autonoma è stato un progetto altamente innovativo, in quanto ha previsto l’utilizzo di tecnologie avanzate per coordinare e controllare in modo esteso flotte di mezzi eterogenei (ad esempio mezzi a guida autonoma, mezzi tradizionali elettrici o a combustione interna).
Il principio alla base di questa sperimentazione è stato l’estensione della centrale di controllo di I&S attraverso l’utilizzo di algoritmi e di sistemi di comunicazione avanzati; questo ha permesso di controllare in modo centralizzato tutte le categorie dei mezzi, ottimizzando il loro utilizzo e riducendo al tempo stesso il consumo di energia e l’impatto ambientale.
La centrale di controllo è in grado di programmare i mezzi in base alle richieste degli utenti, alla complessità delle missioni e alle condizioni del traffico, pianificando i percorsi in modo efficiente e riducendo il tempo di percorrenza. Inoltre, la centrale di controllo è in grado di monitorare lo stato di carica delle batterie dei mezzi e decidere quale mezzo inviare per effettuare un servizio, in modo da ottimizzare l’utilizzo di tutti i mezzi della flotta.
Questa sperimentazione rappresenta un importante passo avanti nella gestione della mobilità urbana per la raccolta dei rifiuti differenziati, permettendo di integrare in modo efficace e coordinato mezzi di trasporto diversi e di migliorare l’efficienza e la sostenibilità dei servizi ambientali.
In generale, l’utilizzo di mezzi a guida autonoma nella gestione dei rifiuti e nello spazzamento delle strade può portare a una maggiore efficienza e sicurezza, riducendo al tempo stesso i costi operativi e l’impatto ambientale.
L’esperienza del progetto di ricerca di I&S è stata molto positiva, in quanto finalizzata nello sviluppo di una centrale di controllo altamente innovativa con sistemi di interconnessione in tempo reale con mezzi a guida autonoma che si muovono sul territorio. L’utilizzo questa tipologia di mezzi potrebbe diventare sempre più diffuso in diverse città del mondo.
I vantaggi dell’utilizzo di mezzi a guida autonoma nella raccolta dei rifiuti sono molteplici. In primo luogo, questi mezzi possono lavorare in modo continuo, 24 ore su 24, senza interruzioni o pause. Inoltre, possono essere programmati per seguire percorsi specifici, ottimizzando così il percorso di raccolta e riducendo il tempo necessario per completare il servizio.
Inoltre, i mezzi a guida autonoma sono più sicuri, poiché non richiedono la presenza di un conducente e sono in grado di rilevare eventuali ostacoli o pericoli presenti sul loro percorso.

Anche nello spazzamento delle strade, l’utilizzo di mezzi a guida autonoma può portare a diversi vantaggi. Questi mezzi possono essere programmati per spazzare le strade e piazze in modo continuo, senza interruzioni, e possono essere utilizzati per coprire grandi aree in poco tempo.
Inoltre, i mezzi a guida autonoma possono essere dotati di sensori in grado di rilevare la presenza di rifiuti o detriti negli spazi pubblici, permettendo una maggiore efficienza nella pulizia di strade e piazze.
Servizi e prodotti per la mobilità
Progetto di ricerca SmartNAV: georeferenziazione proporzionale all’obiettivo