Richiesta informazioni
Richiesta informazioni
 Contatti
Contatti
 Supporto
Supporto

Alcune settimane fa si è concluso il progetto di ricerca SmartNav, realizzato da I&S e focalizzato sullo studio e ricerca di modelli e strumenti tecnologici innovativi con l’obiettivo di raggiungere una localizzazione e navigazione in tempo reale ad altissima precisione, utilizzando apparecchiature commerciali e a basso costo.
Con l’avvento di Google Maps sui cellulari e la diffusione del GPS, il concetto di georeferenziazione è diventato un concetto da “supermercato”. I GPS alcuni anni fa venivano principalmente utilizzati sulle navi e sugli aerei, ma oggigiorno li troviamo ovunque: nelle automobili per la localizzazione e la navigazione, negli smartphone per la rintracciabilità in caso di furto, e in molti altri oggetti di uso quotidiano.
L’ampia diffusione del GPS come tecnologia non corrisponde però ad una altrettanto ampia conoscenza degli aspetti più tecnici legati alle attività di georeferenziazione degli oggetti: c’è infatti una certa tendenza a banalizzare il concetto stesso di georeferenziazione, ad esempio sottovalutando le differenze in termini di precisione fra le varie tecnologie disponibili. Ma è doveroso sottolineare come, in molti contesti professionali, sia imprescindibile un’accuratezza nell’ordine di pochi centimetri e come, per ottenerla, sia spesso necessario ricorrere a tecnologie molto più sofisticate e costose del GPS.
Da qui l’esigenza di indagare e studiare nuovi metodi e tecnologie che consentano realmente di georeferire oggetti statici e in movimento in maniera molto precisa ma contenendo i costi.
Quali sono ad oggi le tecnologie disponibili per georeferenziare degli oggetti?
Il sistema di posizionamento GPS (acronimo in inglese: Global Positioning System) è un sistema di posizionamento e navigazione satellitare militare statunitense.
Attraverso una rete dedicata di satelliti artificiali in orbita, fornisce a un terminale mobile o ricevitore GPS informazioni sulle sue coordinate geografiche e sul suo orario in ogni condizione meteorologica, ovunque sulla Terra o nelle sue immediate vicinanze dove vi sia un contatto privo di ostacoli con almeno quattro satelliti del sistema. La localizzazione avviene tramite la trasmissione di un segnale radio da parte di ciascun satellite e l’elaborazione dei segnali ricevuti da parte del ricevitore.
Il grado attuale di accuratezza è dell’ordine di alcuni metri e dipende fortemente dalle condizioni meteorologiche, dalla disponibilità e dalla posizione dei satelliti rispetto al ricevitore, dalla qualità e dal tipo di ricevitore, dagli effetti di radiopropagazione del segnale radio in ionosfera e troposfera (es. rifrazione), dagli effetti della relatività.
Il sistema satellitare globale di navigazione (GNSS Global Navigation Satellite System) è un sistema di geo-radiolocalizzazione e navigazione terrestre, marittima o aerea, che utilizza una rete di satelliti artificiali in orbita e pseudoliti di diverse nazioni.
Un tale sistema fornisce un servizio di posizionamento geo-spaziale a copertura globale che consente a piccoli ed appositi ricevitori elettronici di determinare le loro coordinate geografiche (longitudine, latitudine ed altitudine) su un qualunque punto della superficie terrestre o dell’atmosfera, elaborando segnali a radiofrequenza trasmessi da satelliti.
Tra questi si annoverano il sistema statunitense NAVSTAR Global Positioning System (GPS), il sistema russo GLONASS, il sistema europeo GALILEO, il sistema cinese BEIDOU ed il sistema indiano IRNSS.
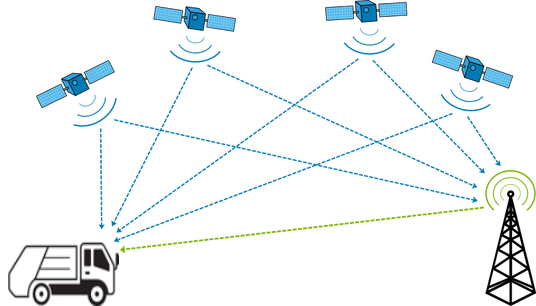
La precisione di localizzazione del GNSS (Global Navigation Satellite System) può essere aumentata in questo momento in un solo modo: includendo una stazione di riferimento.
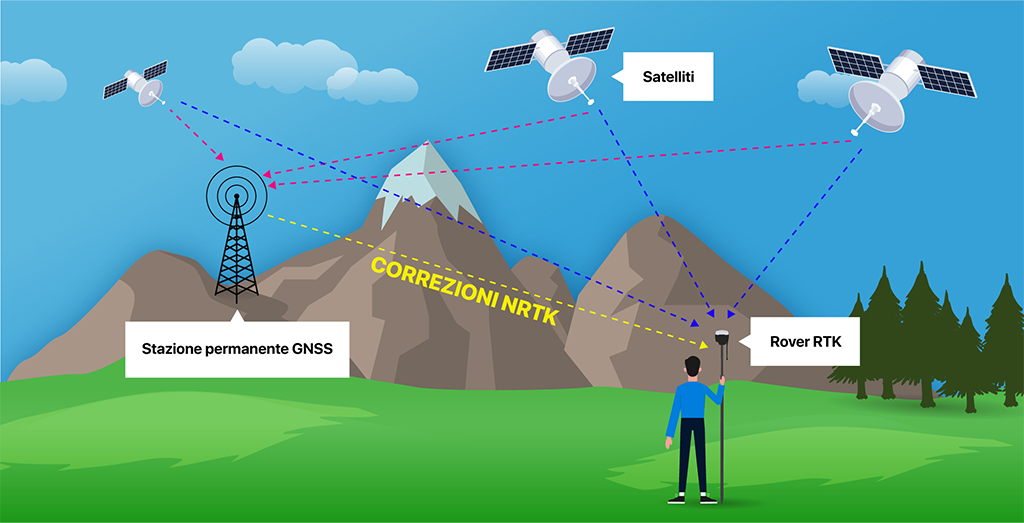
Il segnale GNSS, nel tragitto dal satellite al ricevitore terrestre, attraversa l’atmosfera ed a causa delle condizioni meteorologiche trova proprietà atmosferiche diverse all’interno di una piccola area; questo modifica il tempo di propagazione del segnale e genera disturbi. Includendo stazioni con coordinate note, le cosiddette “stazioni fisse di riferimento sul territorio”, è possibile calcolare in tempo reale questi errori. I dati utilizzati a questo scopo sono quindi chiamati dati di correzione ed il loro utilizzo aumenta sensibilmente la precisione della misurazione della posizione.
In questo contesto le misurazioni effettuate da un rover (ricevitore GNSS mobile) vengono rettificate a posteriori (nell’ambito del cosiddetto post-processing) in modo che a seconda del ricevitore GNSS utilizzato sia possibile raggiungere un grado di precisione compreso tra pochi decimetri a pochi centimetri. Questo metodo differenziale può essere adottato anche in tempo reale. Il presupposto è costituito a questo scopo da un mezzo di comunicazione (radio, telefonia mobile ecc.) tra la stazione di riferimento e il rover. A seconda delle misurazioni GNSS utilizzate (codice o fase) si parla a questo proposito di GNSS differenziale (DGNSS) con un grado di precisione nell’ordine di metri, oppure di Real-time Kinematic (RTK) con un grado di precisione di decimetri o centimetri.
L’ipotesi di ricerca è stata dunque quella di sperimentare modelli e strumenti tecnologici che fossero in grado di raggiungere una localizzazione e navigazione di precisione in tempo reale RTK, ma facendo ricorso ad apparecchiature commerciali a basso costo.
Più nello specifico, ambito del progetto è stata la geolocalizzazione territoriale ed il posizionamento con una precisione di decimetri / centimetri di oggetti in mobilità, quali autovetture o mezzi operativi.
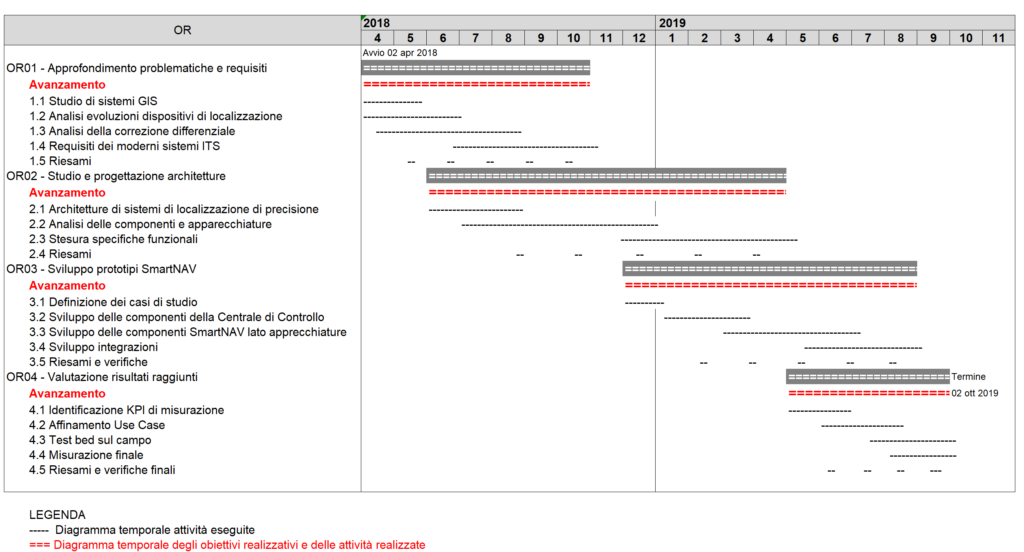
Per lo sviluppo del progetto è stato adottato un approccio metodologico suddiviso in quattro Obiettivi Realizzativi (OR), su un arco temporale di 18 mesi; un supporto nell’identificazione dell’ambito e nella stesura di alcuni elementi progettuali è stato fornito dal Centro Ricerca Fiat di Trento.
I primi due Obiettivi Realizzativi sono classificabili come Ricerca Industriale (RI), gli ultimi due come Sviluppo Sperimentale (SS).
Il progetto pilota di SmartNAV è basato sulla tecnologia DGNSS, ossia la localizzazione con correzione differenziale in tempo reale RTK, utilizzando come riferimento la rete Topografica del Trentino (TPOS).
Sono stati predisposti alcuni mezzi pilota configurati in modo mirato, in grado di soddisfare diverse modalità d’utilizzo.
Le apparecchiature mobili utilizzate sui mezzi pilota erano Black Box commerciali programmabili, adeguatamente personalizzate dai tecnici I&S.
Elemento fondamentale del progetto è stata la predisposizione di un test site (campo prova) in prossimità di Trento, con punti cartografici millimetrici sul terreno, percorsi per i mezzi, punti di fermata e di attesa.

Le misurazioni finali sono state eseguite nel test site predisposto per il progetto. È stato disegnato un percorso di 180 metri composto da punti cartografici millimetrici distanti 20 metri.
Le rilevazioni sono state eseguite in più modalità: con mezzo fermo (punto fisso) e con mezzo in movimento a diverse velocità (10, 20, 40, 60 km/h).
La presenza di tralicci dell’alta tensione sopra il campo prova si sono rivelati ininfluenti nelle misurazioni finali. A seguito degli svariati test effettuati sul campo, utilizzando i diversi mezzi pilota, si sono rilevate precisioni sempre maggiori nel corso del tempo.
Durante le misurazioni, con i continui affinamenti dei parametri di regolazione della strumentazione commerciale utilizzata, si è raggiunto un risultato che non ci si aspettava all’inizio del progetto, ossia la ‘precisione centimetrica’ (1 cm).
Per le rilevazioni in mobilità sono state utilizzate diverse configurazioni, diversi percorsi, diversi mezzi, diverse velocità.
Adottando il medesimo approccio utilizzato per le rilevazioni statiche, sono stati eseguiti continui affinamenti dei parametri di regolazione della strumentazione commerciale installata sui mezzi, raggiungendo un “precisione decimetrica” (circa 20 cm).
Un risultato importante, riscontrato nel corso della misurazione, è stata la precisione di localizzazione indipendente dalla velocità del mezzo; tutto questo fino a 60 km/h, vincolo progettuale.
Il progetto di ricerca ha permesso ad I&S di crescere le proprie competenze in un segmento di mercato innovativo quale la localizzazione di precisione di oggetti fissi e, ancora più importante, di mezzi in mobilità sul territorio.
Ha permesso inoltre di comprendere come aumentare sensibilmente il livello di precisione della localizzazione di un mezzo, agendo semplicemente sulle modalità di configurazione delle apparecchiature commerciali utilizzate nell’allestimento dei mezzi dei propri clienti.
Questi importanti risultati hanno inoltre permesso di avviare un nuovo progetto di ricerca, denominato Smart Drive Assistant (SDA), che ha previsto lo studio, la progettazione e la sperimentazione di una infrastruttura tecnologica innovativa capace di gestire con precisione, nelle aree urbane, uno o più mezzi a guida autonoma, assistita e automatica.